Publications
Research Publications
My research focuses on perception, representation, and planning for robot manipulation. I work at the intersection of computer vision, machine learning, and robotics to develop systems that can better understand and interact with their environment.
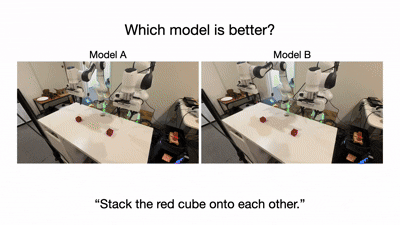
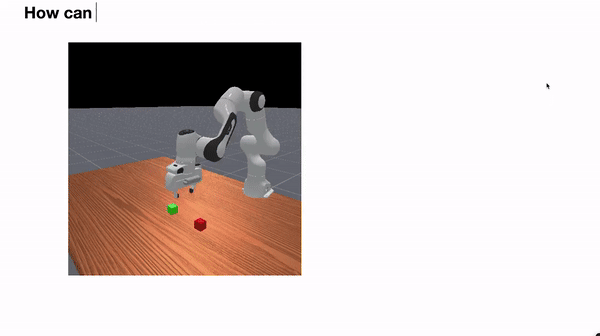
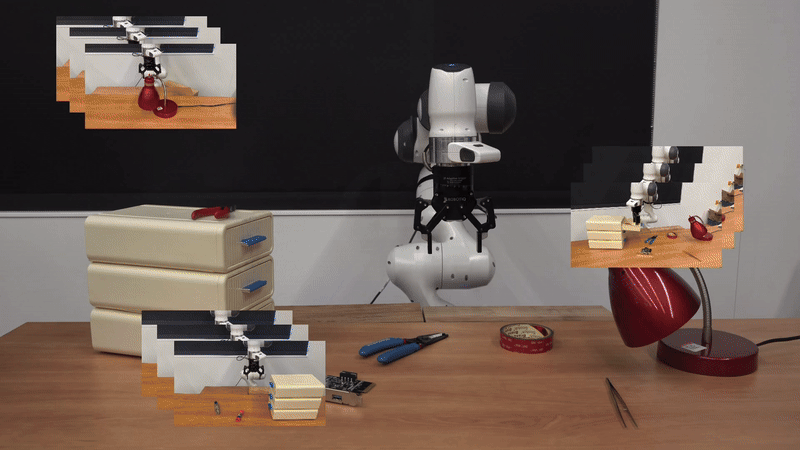
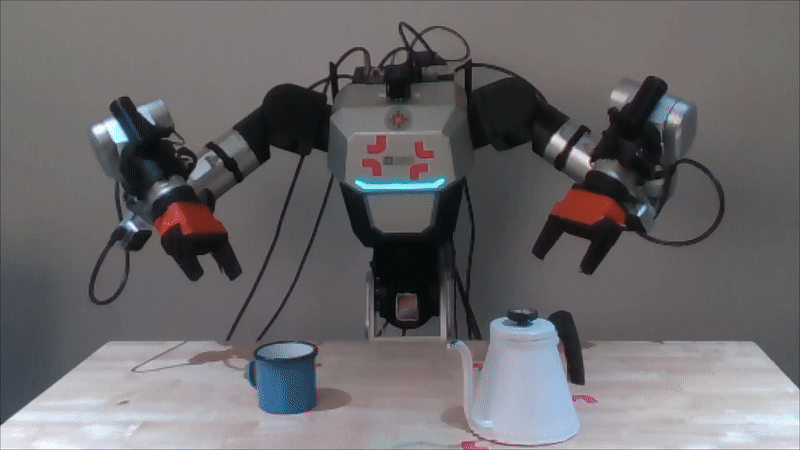
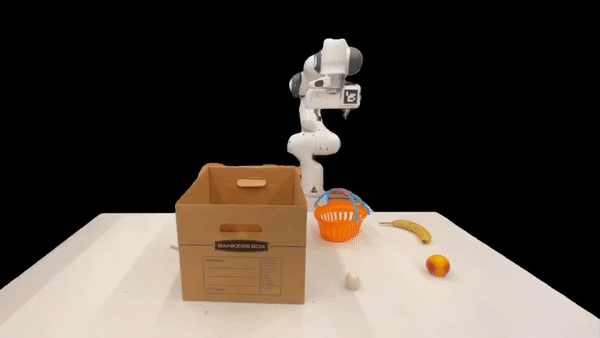
MolmoAct: Action Reasoning Models that can Reason in Space
ICRA 2026
Action reasoning models with spatial reasoning capabilities for robotic manipulation tasks.